
Home |
Research |
Courses |
Personal |
CS6630 -- Project 4
Dafang Wang
1. Color Compositing
Script Used: “ Composite.tcl ”, “Isosurf.tcl”
Use information for the script:
“Composite.tcl” visualizes the skin and skull with volume
rendering. “Isosurf.tcl” uses isosurfacing to render the image.
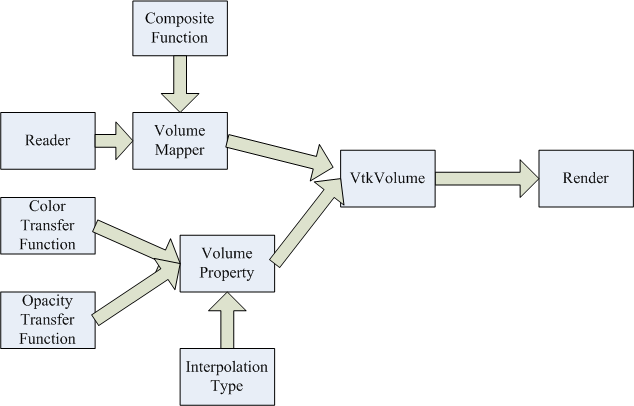
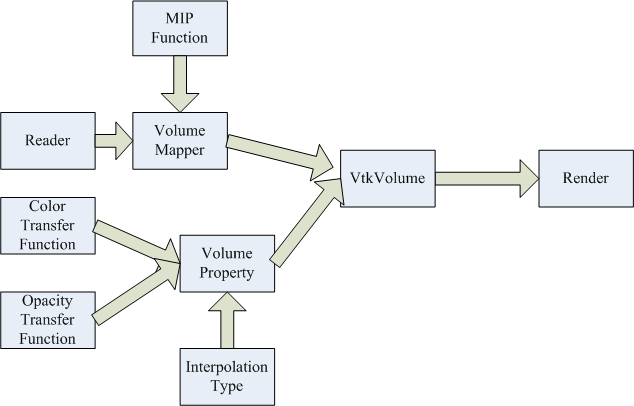
VTK pipeline:
File Produced: “vol1_1.png”, “vol1_2.png”, “vol1_3.png”,
“iso1_1.png”, “iso1_2.png”, “iso1_3.png”
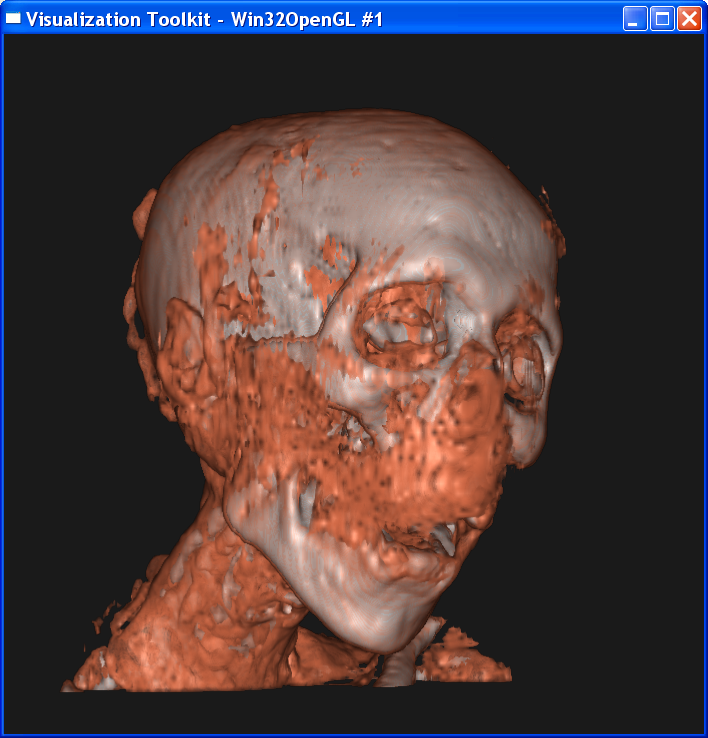
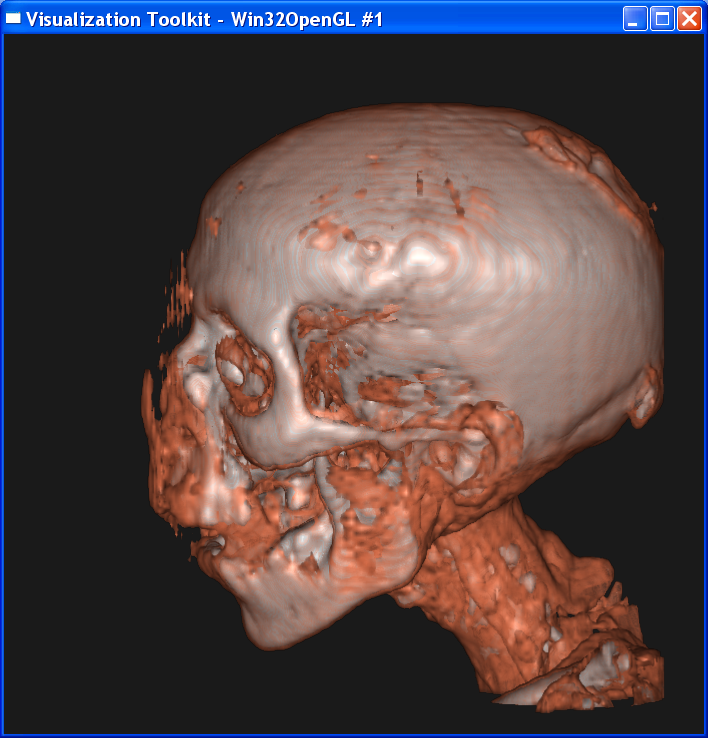
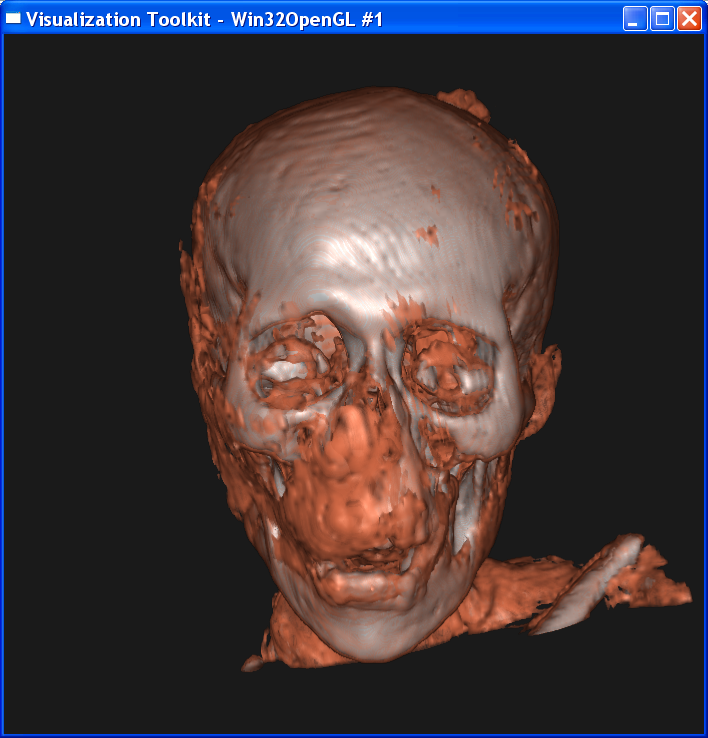
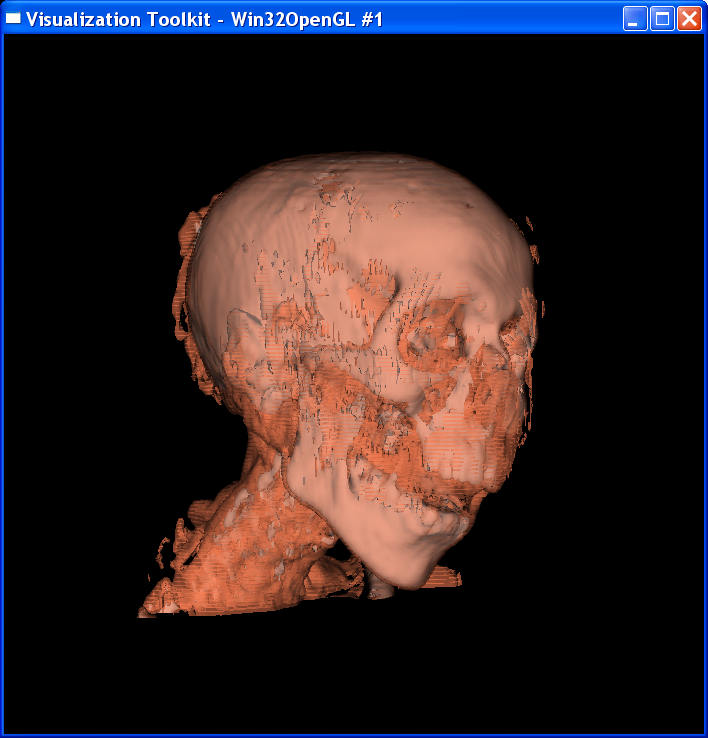
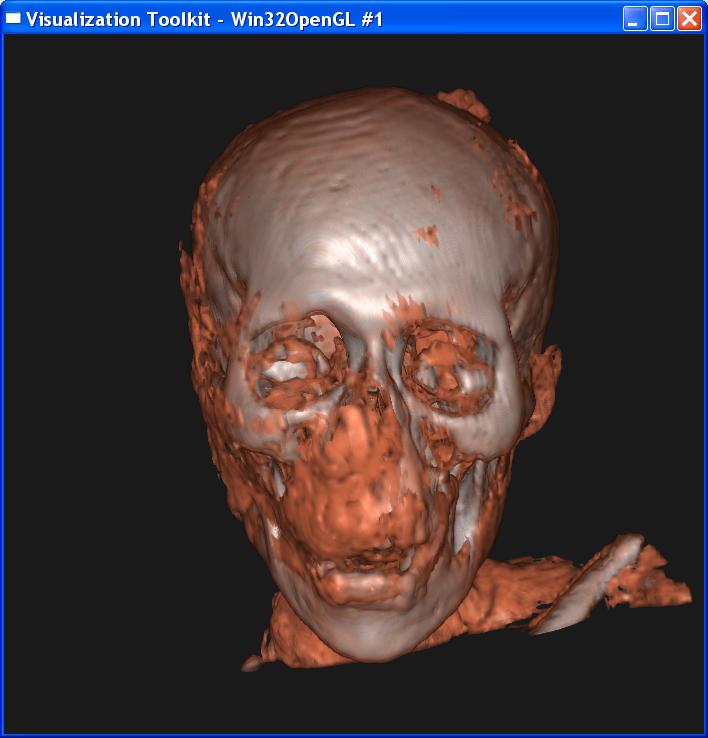
Volume rendering:
Isosurface
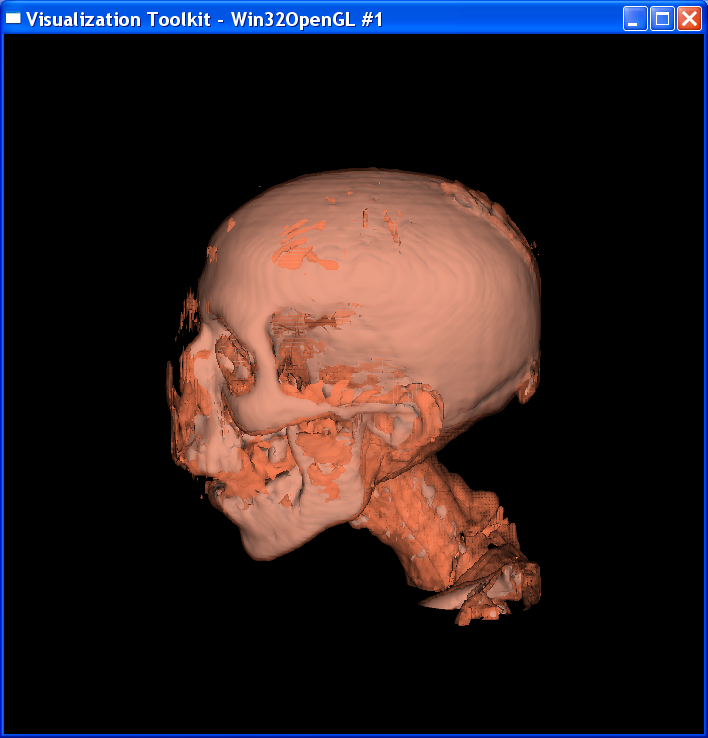
Technical Point:
To key in this part is find the
value for skin isosurface and bone isosurface. Knowing that the value at each voxel is from 0 to 255, I set two scroll bars to control
the data range in the contour filter.( I remove it
from the program at last ). Then I fix the upperbound of the data range as 255 and adjust the lower bound of the data range. As I
observed, the smallest value is the background noise, then comes the skin
value, which is between 85 to 95, and finally the bone with value around 130.
Keep this observation in mind, I set the isovalue in skin as 90 and isovalue for bone as 130, which gives the best image.
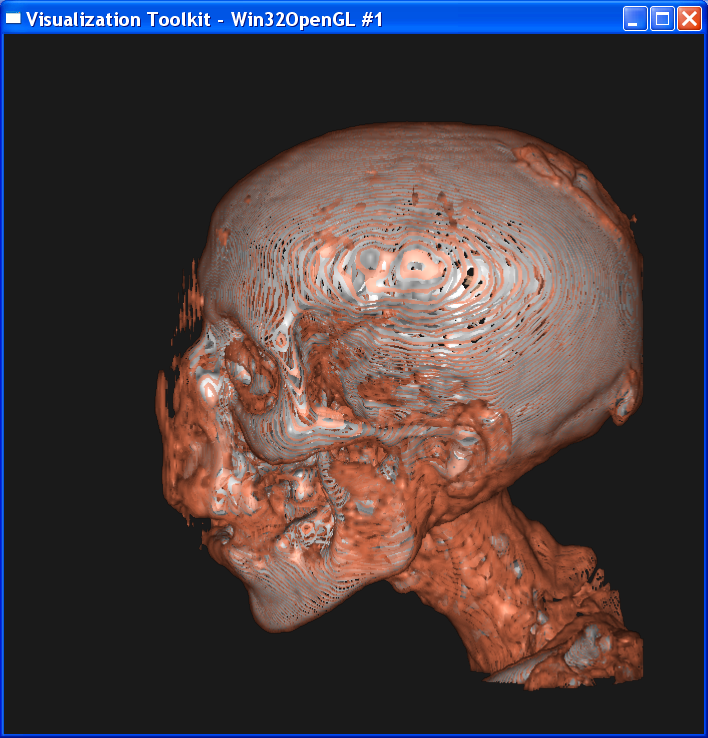
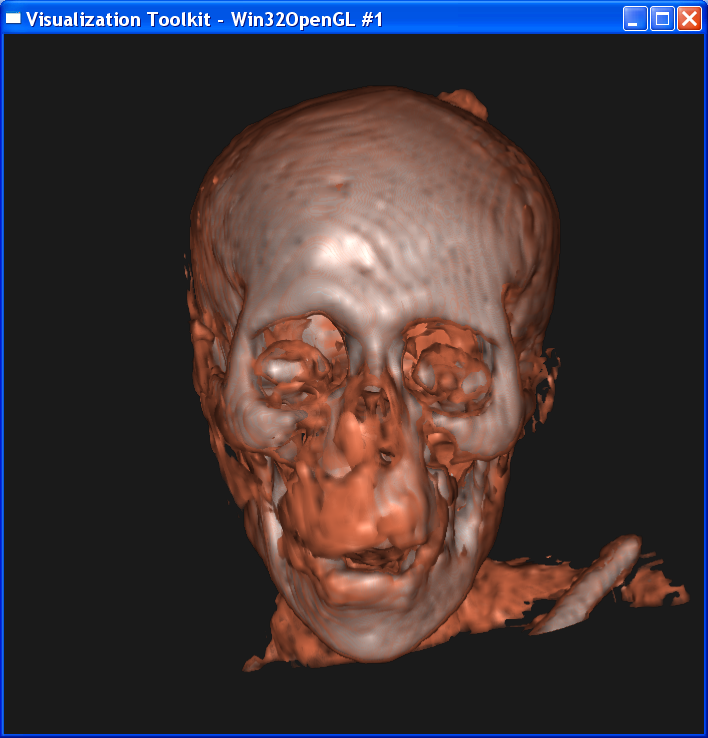
For the composite volume
rendering, I set alpha=0.6 around skin value, alpha=1 around bone value, and 0
elsewhere. This makes only the skin and bone visible. Also I set skin color to
dark yellow and bone color to light grey.
Answer Question in Part 1:
1. Describe the transfer functions, what relationship
do they have to the isovalues shown in your isosurface value
For the opacity
function, I set alpha=0.6 for skin ( 85-95), and alpha
= 1.0 for bone ( 121-139 ), and alpha=0 elsewhere. The opacity function plays
as a filter. Noises, backgrounds and other tissues other than skin or bone are
all invisible from the screen. As for the relationship to iso-value,
the alpha is non-zero around each iso-value, and zero
elsewhere.
For the color
function, I set (1.0, 0.5, 0.33 ) for skin (85-95),
and ( 0.8, 0.8, 0.8) for bone ( 121-139 ), and black elsewhere. As for the
relation ship to iso-value, the color is the same isosurface color around each iso-value.
2. Do you think volume rendering the mummy dataset
offers a clear advantage over isosurfacing?
I don’t think
volume rendering has a clear advantage to isosurfacing in this mummy dataset. The isosurface technique has an intermediate geometry, so it provides a sharper
edge and make the boundaries between bones and skins more distinct. In
comparison, the volume rendering generates a very smooth transition from bones
to skins on the boundary. So both techniques serves different purposes.
However, to make isosurfacing reasonable, we must assume that there is an inherent geometric structure within
the dataset. For example, we must assume that those points representing bones
have close values. But what if some bones have value around 100 and some bones
have value around 200 and skins have value 50, then isosurfacing will make two separate geometries for these two kinds of bones, although they
may be connected or merged together.
In addition, if
the dataset doesn’t have an inherent geometry, for example, fires, clouds, etc,
then volume rendering is better than isosurfacing.
Another advantage of volume rendering is that
it’s more flexible and easier to implement than isosurfacing.
For example, suppose the situation that we don’t know how many layers/isosurfaces we need to visualize, or we don’t know the
order in which these layers are rendered (This is true when there are some
translucent layers and some opaque layers, the opaque layers should be rendered
first ). In this situation, it’s
hard to use isosurfacing, but volume rendering works
well.
2. Maximum Intensity
Projection Rendering
Script Used: “mip.tcl”
Use information for the script:
Run the tcl file and view the image
VTK pipeline:
File produced: “vol2_1.png”, “mip2_1.png”
Technical Point:
In contrast to the
compositing strategy, MIP only takes the maximum value in each ray and use this value to index the color table.
I noticed that
there is a threshold in the dataset. Values below this threshold are background
noises. So I set threshold=80. The opacity transfer function is such that
opacity=0 for those values below the threshold and opacity=1 for values above
the threshold.
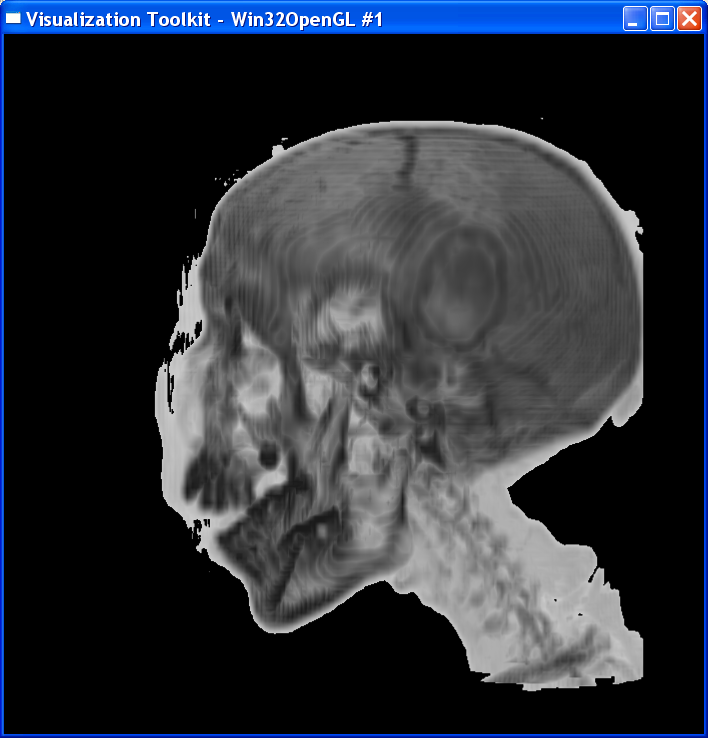
The MIP rendering
is gray-scale only, so the color transfer function is a linear function ranging
from light gray at value=80 to dark gray at value=255.
Answer to Questions in Part2:
1. What are the advantages and disadvantages of MIP
versus compositing-based volume rendering?
The greatest advantage
of MIP to compositing is computation cost, MIP is much faster. The MIP is
fairly forgiving when it comes to noisy data, and produces images that provide
an intuitive understanding of the underlying data.
The disadvantage
of MIP is it’s not possible to tell from a still image where the maximum value occurred
along the ray. For example, we can find out two vessels have the same maximum
value along the ray, we extract both of them, but we don’t know which one is in
the front, which one is back. In contrast, the composited-based
volume doesn’t care because it composite all the values along each ray, instead
of just taking out the maximum value.
3.
Assignment for CS6630
Script Used: “Composite.tcl”
VTK pipeline: the same as Part1, just
change parameters.
All my analysis is
based on the compositing technique. The MIP technique follows the same way, so
I didn’t repeat that.
3.1 Sample distance
Sample distance (the space
between samples) along the rays. What is the relationship between image
quality, rendering time, and sample distance? Give an example of a feature in
the dataset which can be lost by increasing the sample distance too much. Is
there a sample distance that seems "small enough", so that smaller
distances offer no clear advantage?
I experimented several sample distances as the table below
Sample distance
|
4
|
2
|
1
|
0.5
|
0.3
|
0.2
|
0.1
|
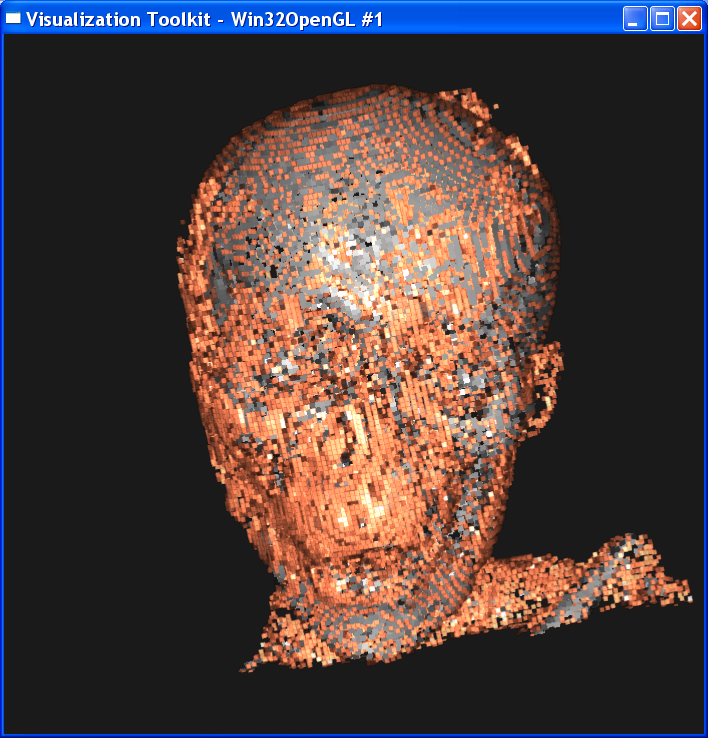
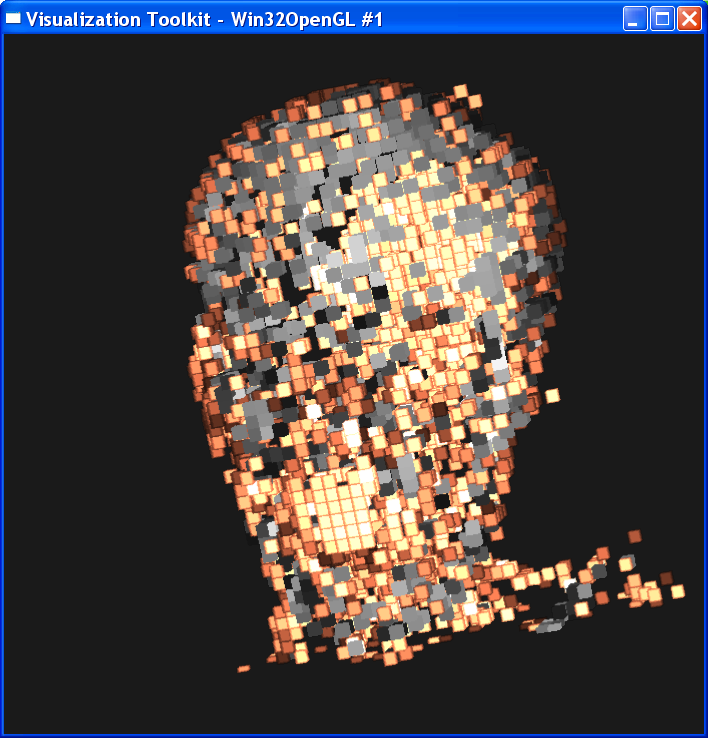
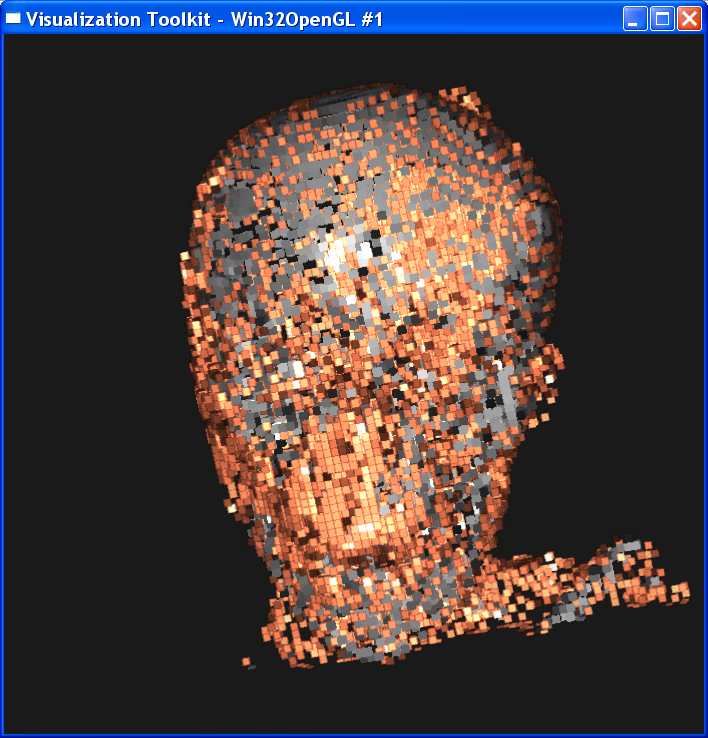
The left column of the following images is in linear interpolation, and
the right column is in nearest neighbor interposition.
Distance=4:

Distance = 2
Distance = 1
Distance = 0.5
Distance = 0.3
Distance = 0.2
Distance = 0.1
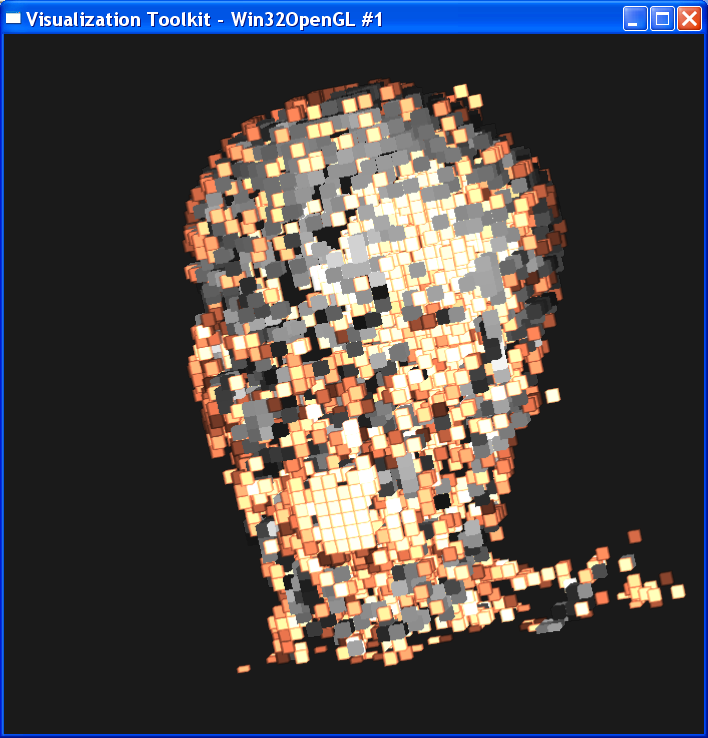
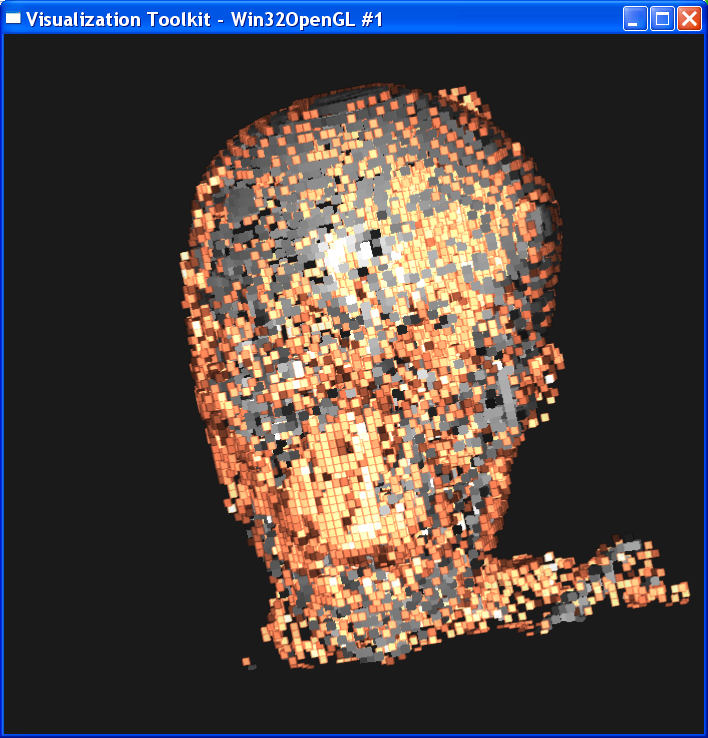
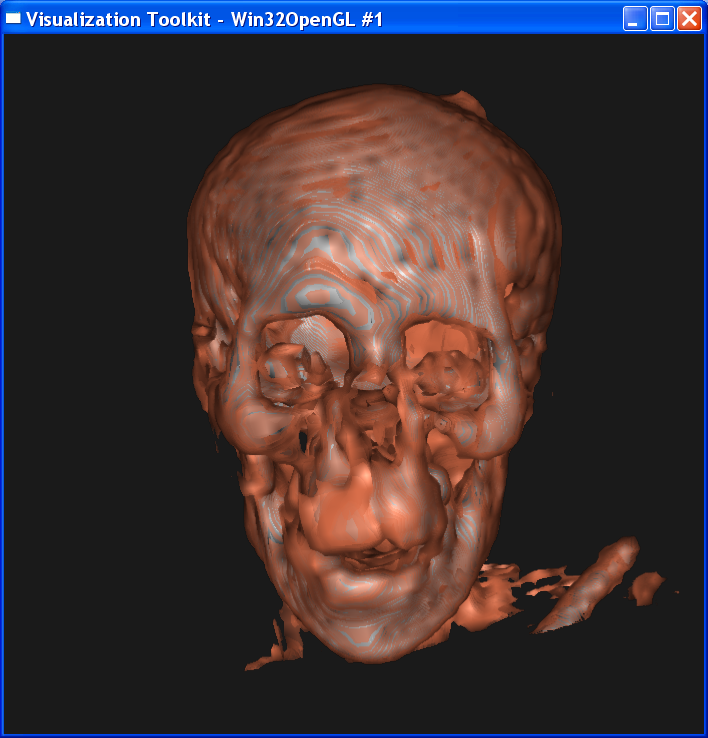
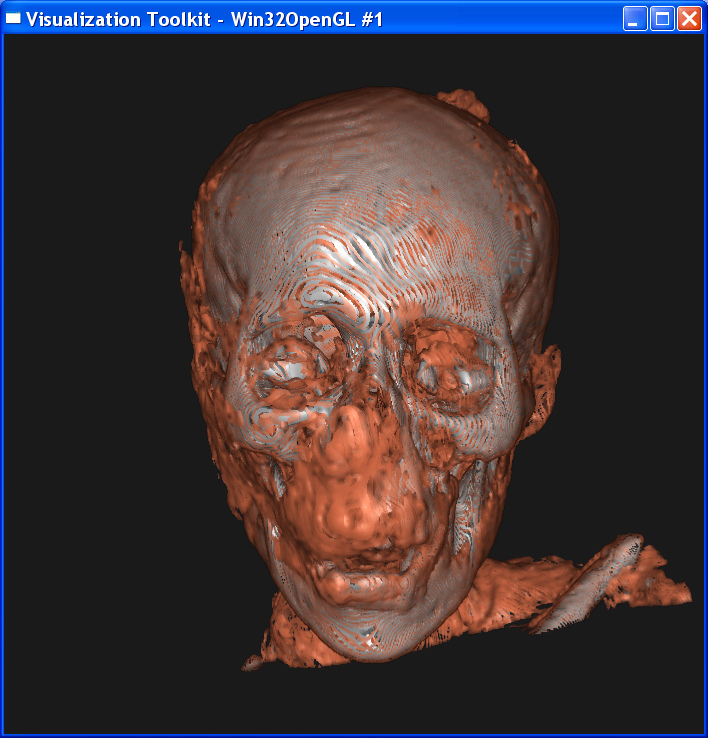
It is obvious from these images that the smaller the sample distance,
the more sample points and the image quality is more refined. When distance=4,
the image is like a frame rather than a continuous surface. When distance=0.1,
the image is well refined. However, decreasing the sample distance will
increase the computation cost since more points are computed. Even with my
latest 2*2 duo core MacPro machine, it still takes
quite a few seconds to generate the image with distance=0.1. I also noticed
that decreasing the sample distance to half doesn’t mean the computing time
will double accordingly. The reason is that the distance is in
volume-coordinates, so the sampling points will not double if sample distance is
scaled to half.
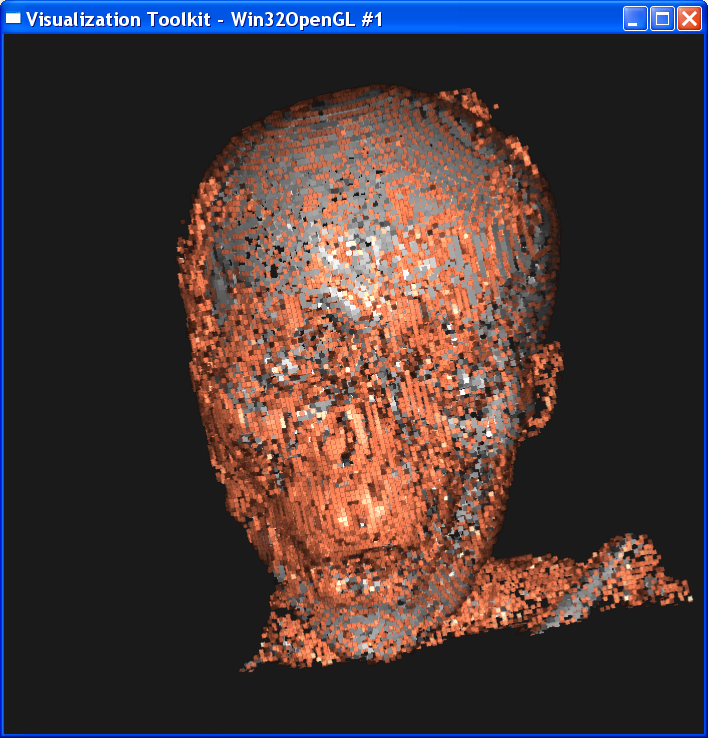
One obvious feature in the dataset that will be lost by increasing the
sample distance is the skull. When distance=4, most skull points in the dataset
are not sampled so that the skull is only represented by discretized lines in the image. As the distance decreases, the lines are denser and when
the distance goes below 0.5, the skull becomes a solid surface in the image.
From my observation, there IS a “small enough” sample distance such
that distances smaller than that offer no clear advantage. The two neighboring
sample points are so close such that the their respective colors looks the same to human eyes. Any smaller sample distance
will be meaningless, but increase the computation cost. For the compositing
rendering of this case, the “small enough” value is 0.3. The following three
images are ordered by distance =0.3, 0.2, 0.1. You can’t tell much difference
among them.
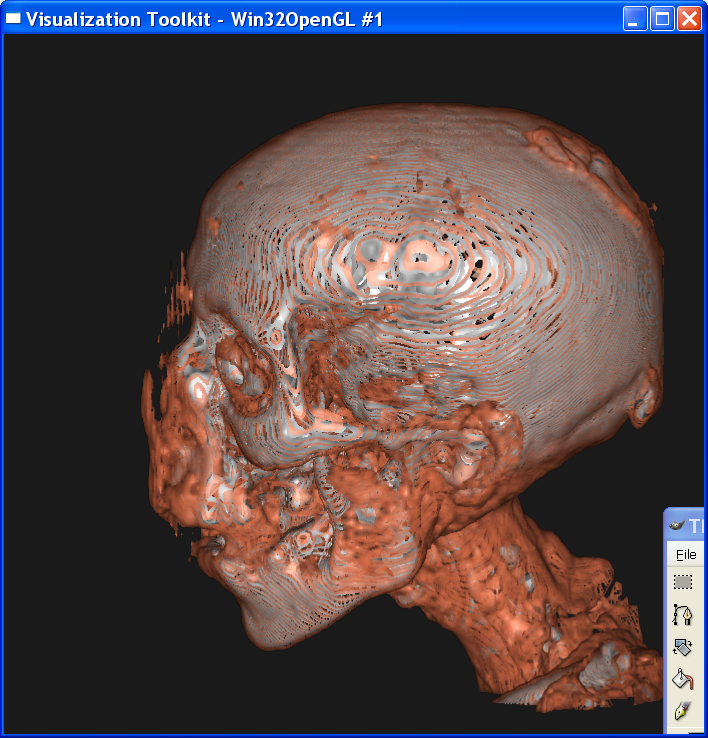
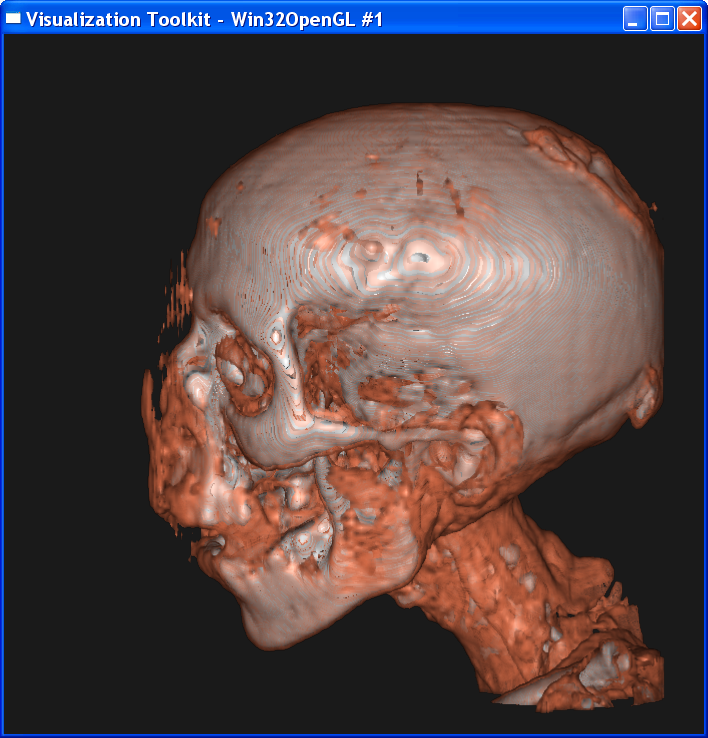
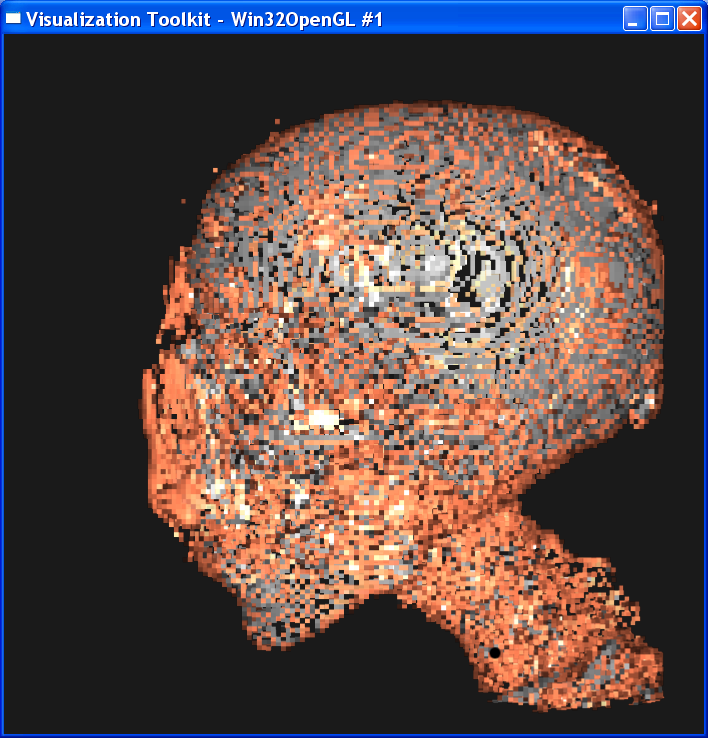
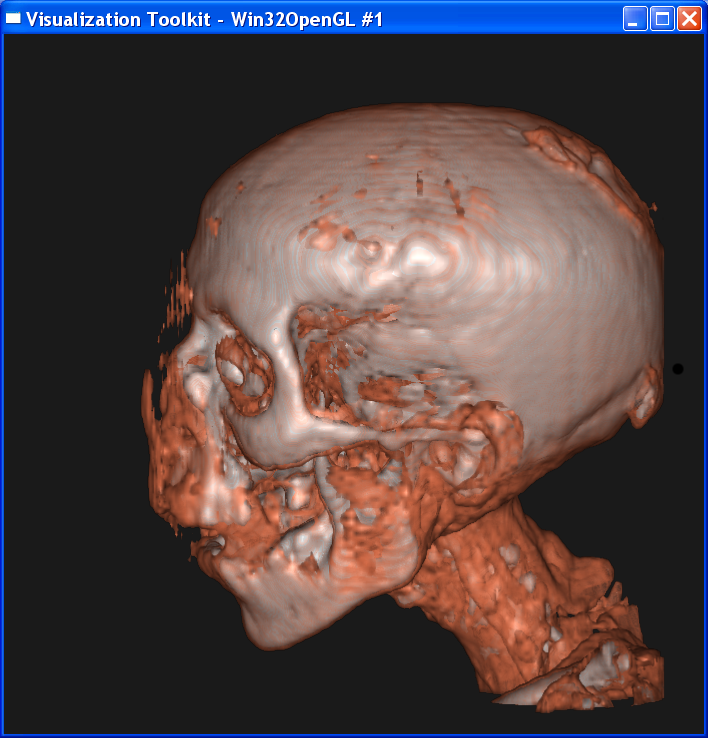
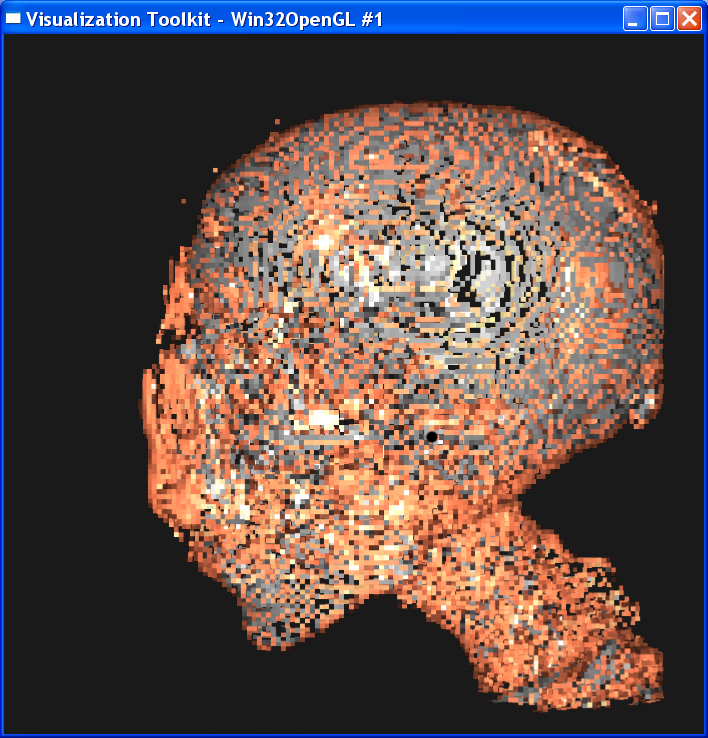
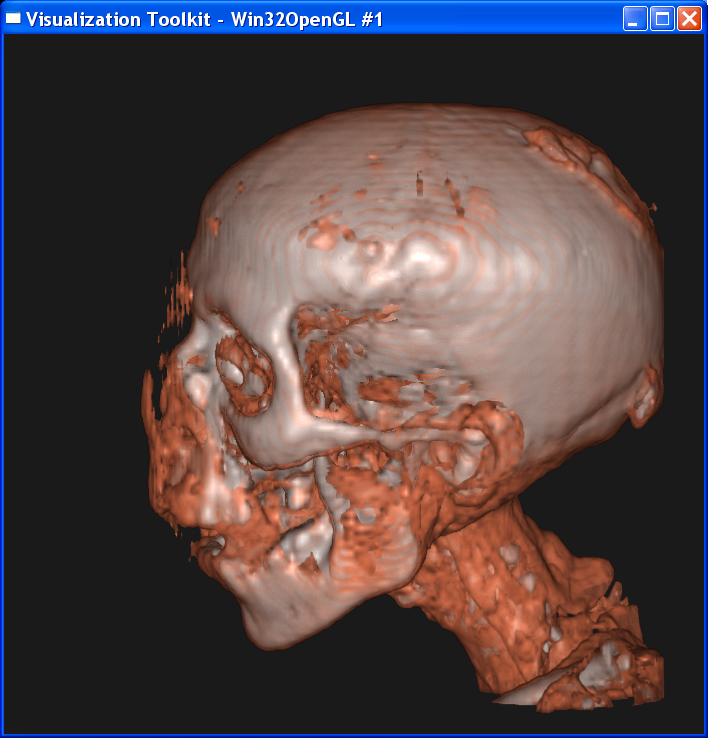
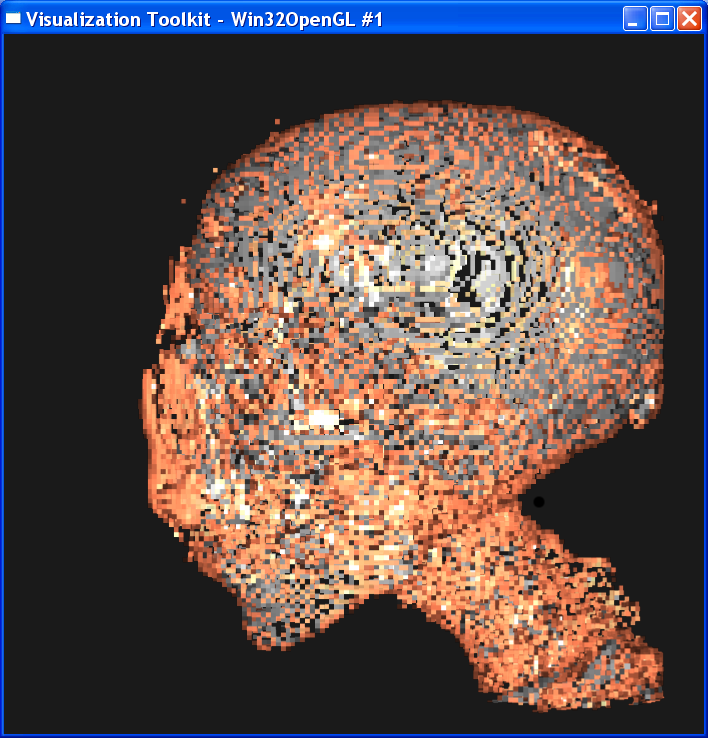
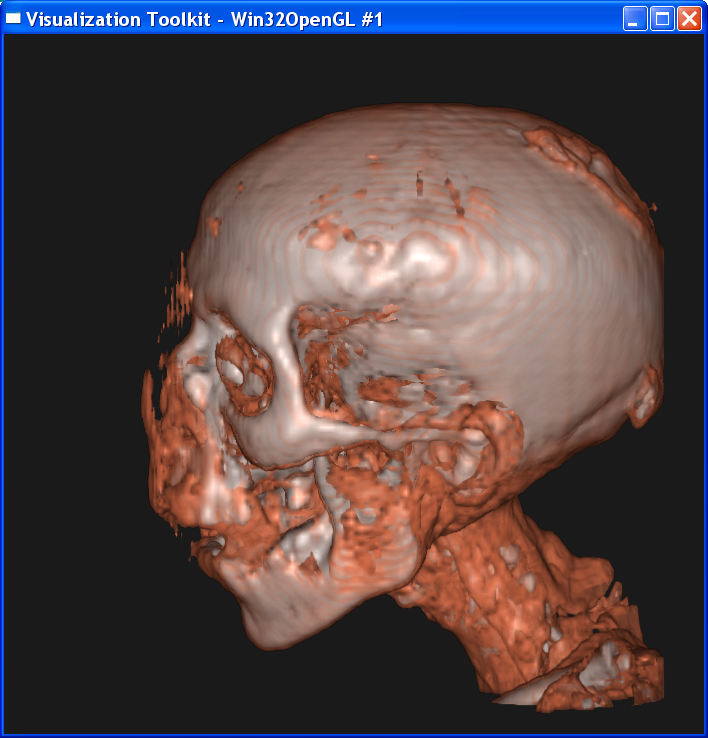
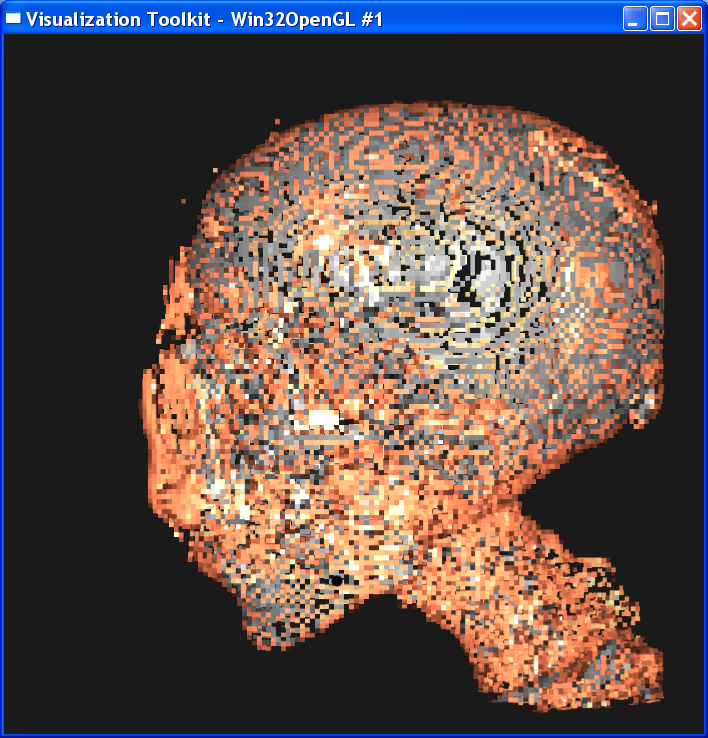
3.2 Interpolation method
Describe the differences between the linear
interpolation and nearest neighbor interpolation.
The nearest
neighbor interpolation is much faster than the linear interpolation, because it
only takes the value on the nearest neighbor point as the value on the sample
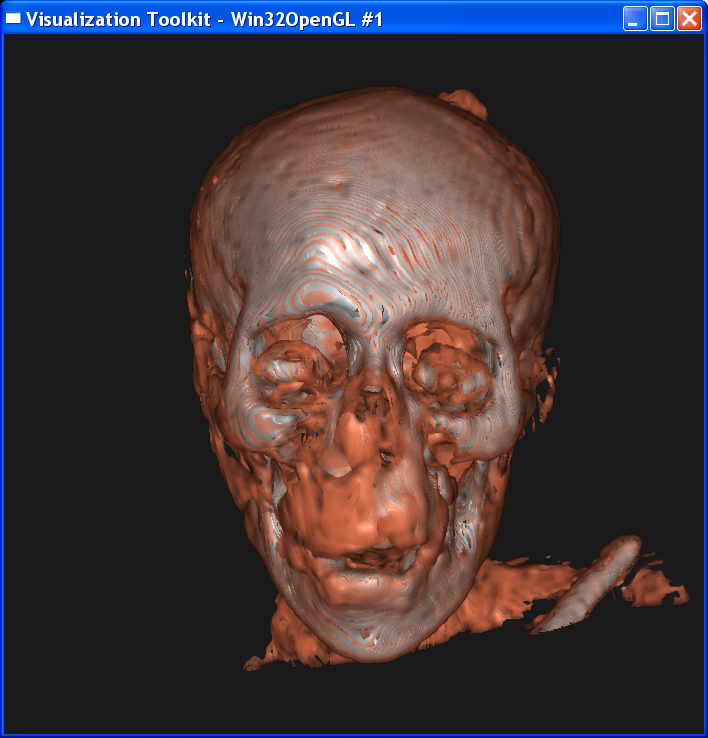
point, without any further computation. However, you can see from above that
the nearest neighbor interpolation gives a very coarse granularity, but the
linear interpolation generates very smooth image.
Another difference
is that the nearest neighbor interpolation is not so sensitive to sample
distance as to linear interpolation. From the images above, distance=0.5 and
distance=0.3 in linear interpolation(the left column)
generates visually different images, but with nearest neighbor there isn’t much
interposition distance=1 and distance=0.2.
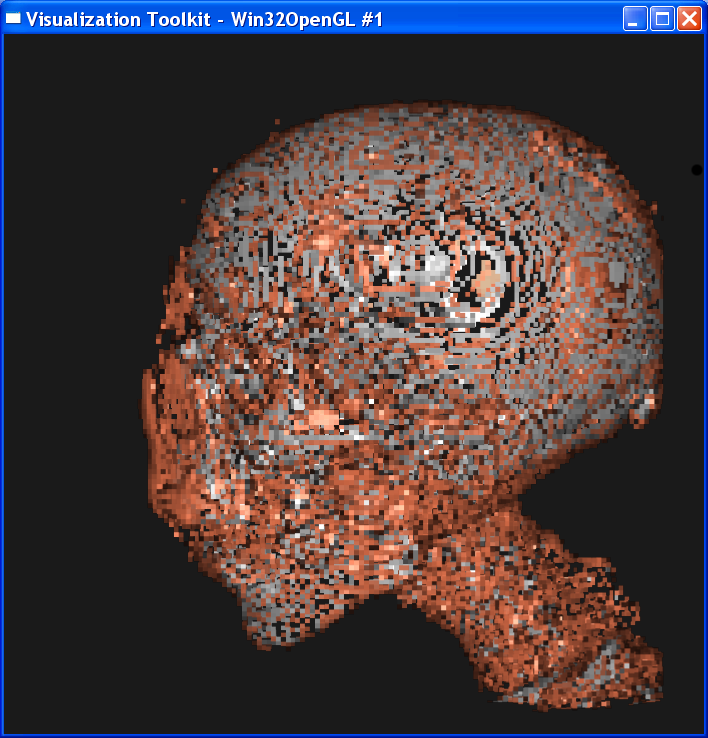
3.3 Dataset resolution
Here I use linear
interpolation, set sample distance=0.3, and render the “mummy.50.vtk”,
“mummy.80.vtk” and “mummy.128.vtk”:
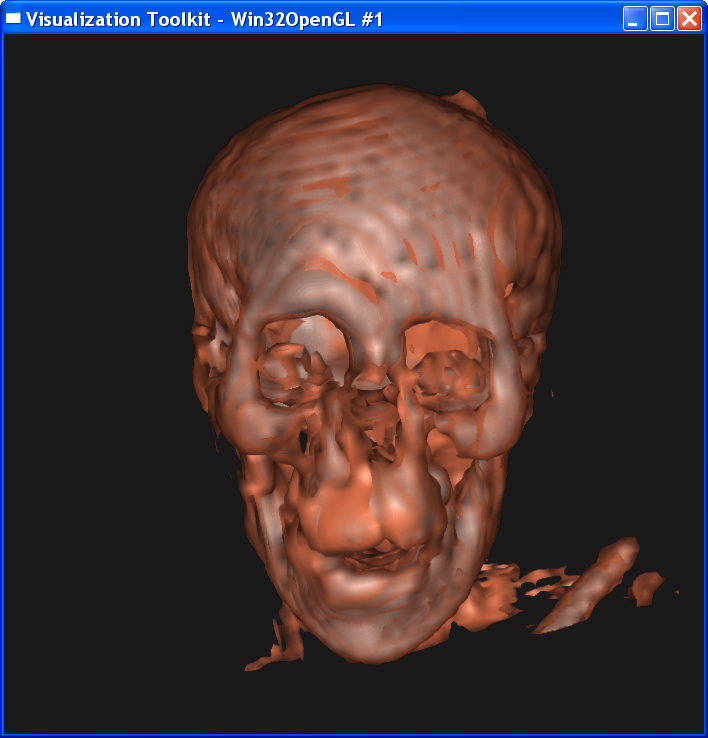
Answer to Questions
1. Are there features that are present in
“mummy.80.vtk” but missing in “mummy.50.vtk” ?
Other parameters(distance,interpolation)
being the same, higher resolution data provides improves the image quality. In
the images above, “mummy.80.vtk” gives more information than “mummy.50.vtk” in
eye features. In “mummy.80.vtk”, we can see more detailed geometric features in
the eye. To be more specific, we can see that there are bones in the center of
the eye( the white area in eyes) and this feature is
clearer in “mummy.128.vtk”. In contrast, in “mummy.50.vtk” we can see only skin( dark yellow area ) in eyes.
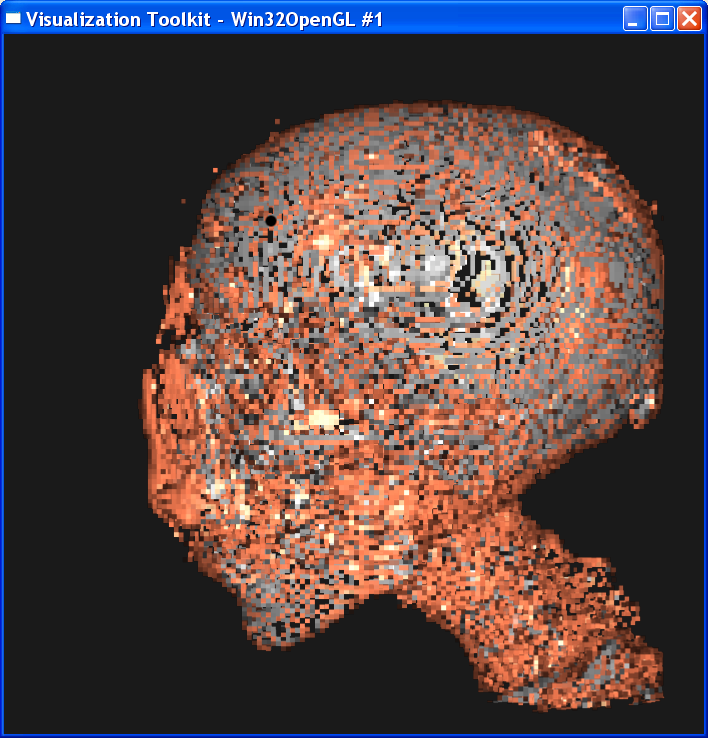
2. How does increasing the dataset resolution change
the difference between the two interpolation methods?
I tested two
cases. In the first case, I set sample distance = 0.3. The following image is
ordered as “mummy.50.vtk”, “mummy.80.vtk”, “mummy.128.vtk”.
The left column is linear interpolation, and the right column is the nearest
neighbor interpolation.
In the second case, I set sample distance = 1.0. The following image is ordered as “mummy.50.vtk”, “mummy.80.vtk”, “mummy.128.vtk”. The left column is linear interpolation, and the right column is the nearest neighbor interpolation.
In either case, we
can get the conclusion that increasing the dataset resolution will decrease the
difference between linear interpolation and nearest interpolation, although
their difference is still obvious. As dataset resolution increases, the
difference between each two neighboring voxels is
smaller. Now that two end points are getting closer, the nearest neighbor
interpolation is getting closer to the linear interpolation value.
This issue also
depends on the sampling distance. Supposing that the sample distance is very
small compared to the resolution (the distance between two neighboring voxels). In this situation, there are several sample points
within each voxel. In linear interpolation, the
values on these sample points are well interpolated and the image is very
smooth. However, in nearest neighbor interpolation, each sample points takes the value on its nearest grid points, and it’s
possible that every sample points chooses a different neighboring grid point!
This will totally mess the final image. In this homework, I don’t know the
distance between two dataset grid points in each resolution, so I can’t verify
my intuition.